Category: 3D SLAM
How to implement 6DoF state estimation on 3D manifold based on neural dynamics?
State estimation in high dimensional space is a big challenge problem. Commonly, we use Lie group to implement 6DoF state estimation in 3D space. However, how does the brain implement path integration in 3D space based on neural dynamics?
Low …
Optimal dynamic coding by mixed-dimensionality neurons in the head-direction system of bats
Finkelstein, Arseny, Nachum Ulanovsky, Misha Tsodyks, and Johnatan Aljadeff. “Optimal dynamic coding by mixed-dimensionality neurons in the head-direction system of bats.” Nature communications 9, no. 1 (2018): 3590.
Abstract:
Ethologically relevant stimuli are often multidimensional. In many brain …
Neuromorphic Stereo Vision for Biologically Plausible Robots
Lea Steffen, Daniel Reichard, Jakob Weinland, Jacques Kaiser, Arne Roennau and Rüdiger Dillmann. Neuromorphic Stereo Vision: a Survey of Bio-inspired Sensors and Algorithms. Front. Neurorobot. | doi: 10.3389/fnbot.2019.00028
Anstract: Any visual sensor, whether artificial or biological, maps the 3D-world …
How grid cells generate unambiguous and high-capacity representations of variables in much higher-dimensional space?
Klukas, Mirko, Marcus Lewis, and Ila Fiete. “Flexible representation and memory of higher-dimensional cognitive variables with grid cells.” bioRxiv (2019): 578641.
The following content is from Klukas 2019.
Grid cell representations are simultaneously flexible and powerful yet rigid …
3D State Estimation and 3D Pose Graph Optimization for 3D SLAM and Navigation
The following are some key references about 3D state estimation, 3D motion, 3D pose graph optimization.
Solà, Joan, Jeremie Deray, and Dinesh Atchuthan. “A micro Lie theory for state estimation in robotics.” arXiv preprint arXiv:1812.01537 (2018).
In this …
NeuroSLAM : Neural Simultaneous Localization and Mapping Workshop 13-14 Mar 2019 Paris (France)
NeuroSLAM: Neural Simultaneous Localization and Mapping Workshop
Simultaneous Localization and Mapping (or SLAM) refers to the problem of constructing a map of an unknown environment as it is actively being explored. SLAM has been treated extensively in mobile robotics, providing …
AntBot: desert ants inspired autonomous navigation in outdoor environments
J. Dupeyroux et al. 2019 presents a navigation system inspired by desert ants’ navigation behavior, which requires precise and robust sensory modalities.
They tested several ant-inspired solutions to outdoor homing navigation problems on a legged robot using two optical sensors …
DeepMind GridCells Code
The DeepMind opens the code of grid cells (Banino et al 2018) via GitHub(https://github.com/deepmind/grid-cells) in Jan. 2019. This package provides an implementation of the supervised learning experiments in Vector-based navigation using grid-like representations in artificial agents, as published …
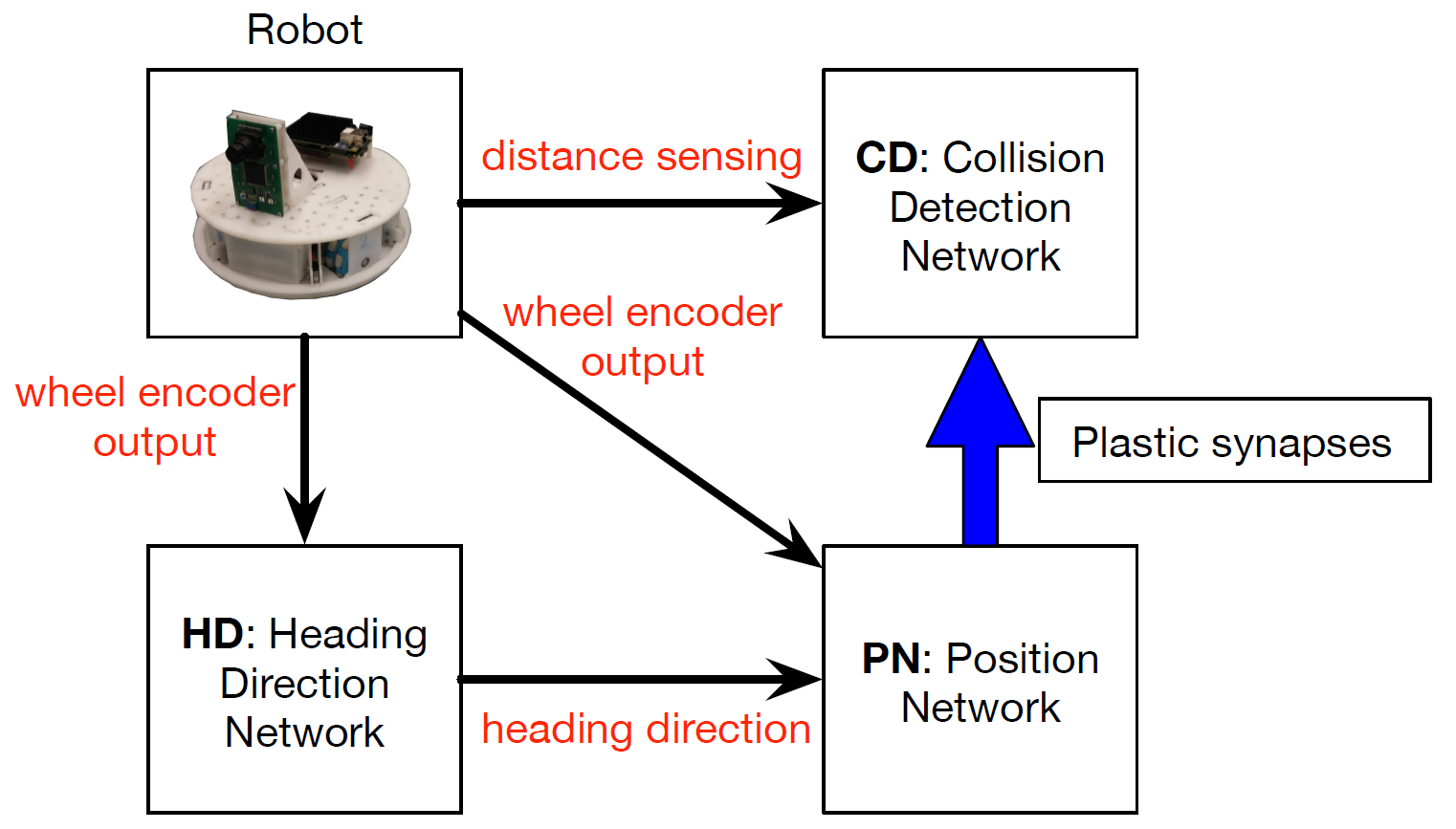
Towards Neuromorphic SLAM and Navigation
The latest research Kreiser et al. 2018, published IROS 2018, investigated the use of ultra low-power, mixed signal analog/digital neuromorphic hardware for implementation of biologically inspired neuronal path integration and map formation for a mobile robot.
For further info, please …
3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments
3D Simultaneous Localization and Mapping and Navigation Planning for Mobile Robots in Complex Environments. June 28, 2017. By Professor Sven Behnke, University of Bonn, Germany…
3D Drone Localization and Mapping
3D Drone Localization and Mapping. Oct.10 ,2018. By Prof. Ioannis Pitas, Aristotle University of Thessaloniki. Contributors: J.M.M. Montiel (University of Zaragoza), J. Ramiro Martinez-de Dios (University of Seville), E. Kakaletsis, N. Nikolaidis (Aristotle University of Thessaloniki)…
3D Motion Estimation
3D Motion Estimation. Oct.10 ,2018. By Prof. Ioannis Pitas, Aristotle University of Thessaloniki.…
Animals Teach Robots to Find Their Way
By Chris Edwards
Communications of the ACM, August 2018, Vol. 61 No. 8, Pages 14-16. 10.1145/3231168
Mammalian research has underpinned the key models used in robot development. Analogs of neural networks found in the rat’s brain underpin the most widespread …
Biologically inspired visual odometry based on the computational model of grid cells
A biologically inspired visual odometry based on the computational model of grid cells, which is developed based on the the source code of the computational model of grid cells: http://clm.utexas.edu/fietelab/code.htm, and LIBVISO2: http://www.cvlibs.net/software/libviso/, by Huimin Lu, Junhao Xiao, …
Learning to Navigate
The excerpt note is about the novel approach of learning to navigate proposed by DeepMind research team in past few period of time.
How did you learn to navigate the neighborhood of your childhood, to go to a friend’s house, …
About
Brain Inspired Navigation Blog
New discovery worth spreading on brain-inspired navigation in neurorobotics and neuroscience
Recent Posts
- Whether hippocampal theta sweeps indicate goal direction during navigation?
- How to implement sparse-to-dense coding transformation between hippocampal areas CA3 and CA1?
- How hippocampal–neocortical communication reconfigure predetermined circuit motifs to flexibly encode experiences?
- How to build efficient robot navigation inspired by honeybee learning flights?
- How tuft dendrites in frontal motor cortex enable flexible learning?
Tags
Categories
- 3D Movement
- 3D Navigation
- 3D Path Integration
- 3D Perception
- 3D SLAM
- 3D Spatial Representation
- AI Navigation
- Bio-Inspired Robotics
- Brain Inspired Localization
- Brain-Inspired Navigation
- Cognitive Map
- Cognitive Navigation
- Episodic Memory
- Excerpt Notes
- Flying Vehicle Navigation
- Goal Representation
- Insect Navigation
- Learning to Navigate
- Memory
- Neural Basis of Navigation
- Path Integration
- Path Planning
- Project
- Research Tips
- Robotic Vision
- Self-Flying Vehicles
- Semantic Memory
- Spatial Cognition
- Spatial Cognitive Computing
- Spatial Coordinate System
- Spatial Learning
- Spatial Memory
- Spatial Resoning
- Time
- Unclassified
- Visual Cortex
- Visual Cue Cells
Links
- Laboratory of Nachum Ulanovsky
- Jeffery Lab
- BatLab
- The NeuroBat Lab
- Taube Lab
- Laurens Group
- Romani Lab
- Moser Group
- O’Keefe Group
- DoellerLab
- MilfordRobotics Group
- The Space and Memory group
- Angelaki Lab
- Spatial Cognition Lab
- McNaughton Lab
- Conradt Group
- The Fiete Lab
- The Cacucci Lab
- The Burak Lab
- Knierim Lab
- Clark Spatial Navigation & Memory Lab
- Computational Memory Lab
- The Dombeck Lab
- Zugaro Lab
- Insect Robotics Group
- The Nagel Lab
- Basu Lab
- Spatial Perception and Memory lab
- The Neuroecology lab
- The Nagel Lab
- Neural Modeling and Interface Lab
- Memory and Navigation Circuits Group
- Neural Circuits and Memory Lab
- The lab of Arseny Finkelstein
- The Epstein Lab
- The Theoretical Neuroscience Lab
- Gu Lab (Spatial Navigation and Memory)
- Fisher Lab (Neural Circuits for Navigation)
- The Alexander Lab (Spatial Cognition and Memory)
- Harvey Lab (Neural Circuits for Navigation)
- Buzsáki Lab
- Brain Computation & Behavior Lab
- ……