
Towards Neuromorphic SLAM and Navigation
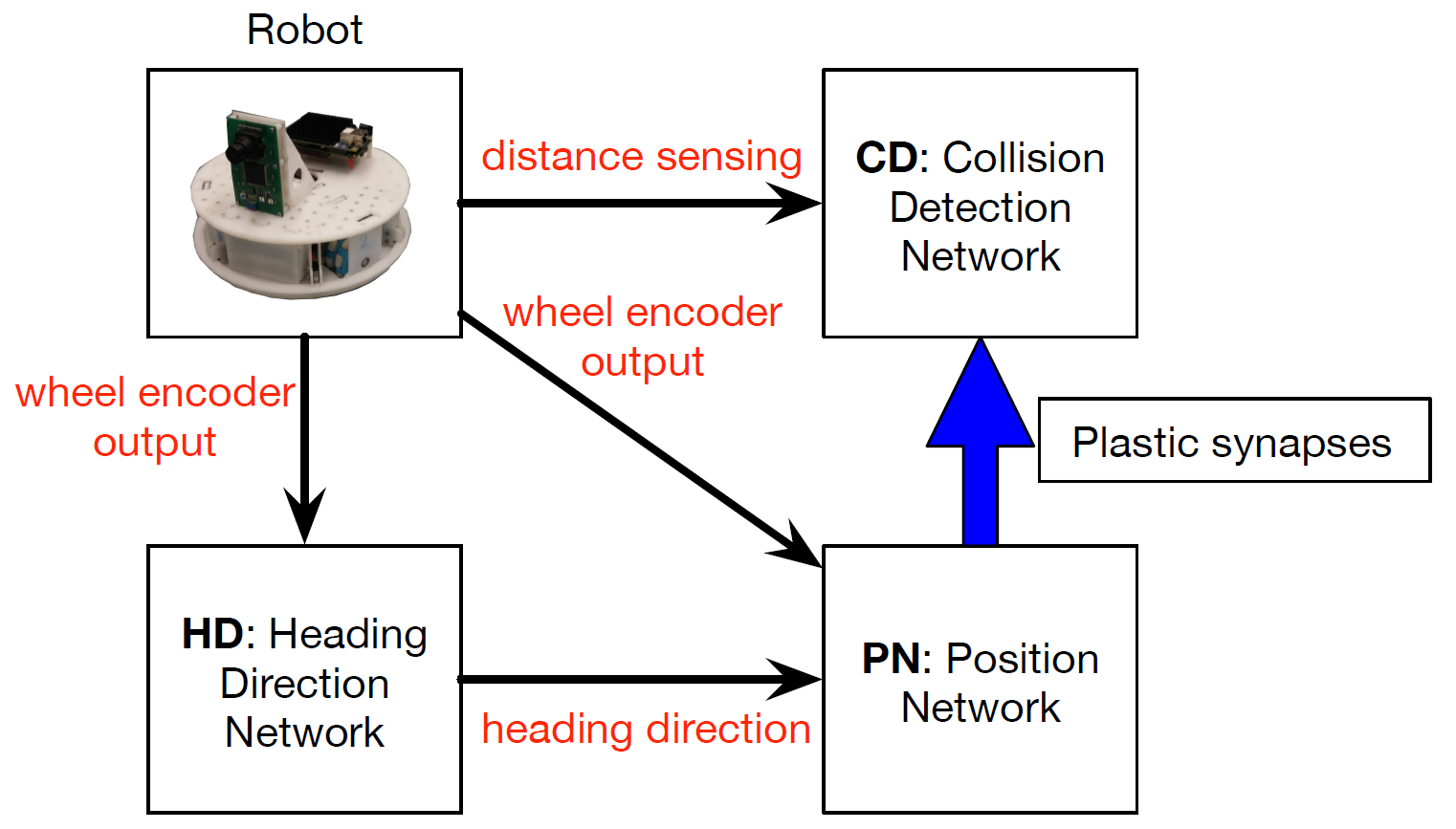
The latest research Kreiser et al. 2018, published IROS 2018, investigated the use of ultra low-power, mixed signal analog/digital neuromorphic hardware for implementation of biologically inspired neuronal path integration and map formation for a mobile robot.
For further info, please read the paper Kreiser et al. 2018.
Kreiser, Raphaela, Alpha Renner, Yulia Sandamirskaya, and Panin Pienroj. “Pose estimation and map formation with spiking neural networks: towards neuromorphic slam.” In 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 2159-2166. IEEE, 2018.
Relevant work Spiking RatSLAM
Galluppi, F., J. Conradt, T. Stewart, C. Eliasmith, T. Horiuchi, J. Tapson, B. Tripp, S. Furber, and R. Etienne-Cummings. “Live demo: Spiking ratslam: Rat hippocampus cells in spiking neural hardware.” In Biomedical Circuits and Systems Conference (BioCAS), 2012 IEEE, pp. 91-91. IEEE, 2012.
Relevant work Gridbot
Tang, Guangzhi, and Konstantinos P. Michmizos. “Gridbot: An autonomous robot controlled by a Spiking Neural Network mimicking the brain’s navigational system.” In Proceedings of the International Conference on Neuromorphic Systems, p. 4. ACM, 2018.
Guangzhi Tang, Arpit Shah, Konstantinos P. Michmizos. Spiking Neural Network on Neuromorphic Hardware for Energy-Efficient Unidimensional SLAM. arXiv:1903.02504. 2019