Category: 3D Navigation
NeuroSLAM : Neural Simultaneous Localization and Mapping Workshop 13-14 Mar 2019 Paris (France)
NeuroSLAM: Neural Simultaneous Localization and Mapping Workshop
Simultaneous Localization and Mapping (or SLAM) refers to the problem of constructing a map of an unknown environment as it is actively being explored. SLAM has been treated extensively in mobile robotics, providing …
Bio-inspired wind sensation for advanced autonomous drones/UAV navigation
Reliability and accuracy of navigation in flying drones are one of the key challenges that must be solved in autonomous applications. Accurate knowledge of position, attitude, and velocity is a critical input for drones operating in cluttered and challenging environments …
How the brain represent 3D head direction in 3D space?
The note is an excerpt from the Shinder et al. 2019. We just describe some key conception and results in this study as a significant note. Please read the original paper if you are interested in the study on https://www.physiology.org/doi/full/10.1152/jn.00880.2017…
A Map in the Sky for Self-Flying Vehicles
A report titled ‘Flying Taxis Take Flight, Presage New Location Intelligence‘ by Frits van der Schaaf.
…Location intelligence has long been used to present real-time information on maps—for transportation companies’ tracking of shipments; utility companies’ monitoring the status
The flying cars are coming soon, how to overcome the challenge of autonomous flying vehicle navigation?
A report titled ‘Elevating the future of mobility: Passenger drones and flying cars‘ by Robin Lineberger, Aijaz Hussain, Siddhant Mehra, Derek M. Pankratz has published on the deloitte.com at January 18, 2018.
How to overcome the …
How the brain’s spatial systems organize their representation of 3D space?
The brain’s spatial map is supported by place cells, encoding current location, and grid cells, which report horizontal distance traveled by producing evenly sized and spaced foci of activity (firing fields) that tile the environment surface. Casalia et al. 2019 …
Towards Neuromorphic SLAM and Navigation
The latest research Kreiser et al. 2018, published IROS 2018, investigated the use of ultra low-power, mixed signal analog/digital neuromorphic hardware for implementation of biologically inspired neuronal path integration and map formation for a mobile robot.
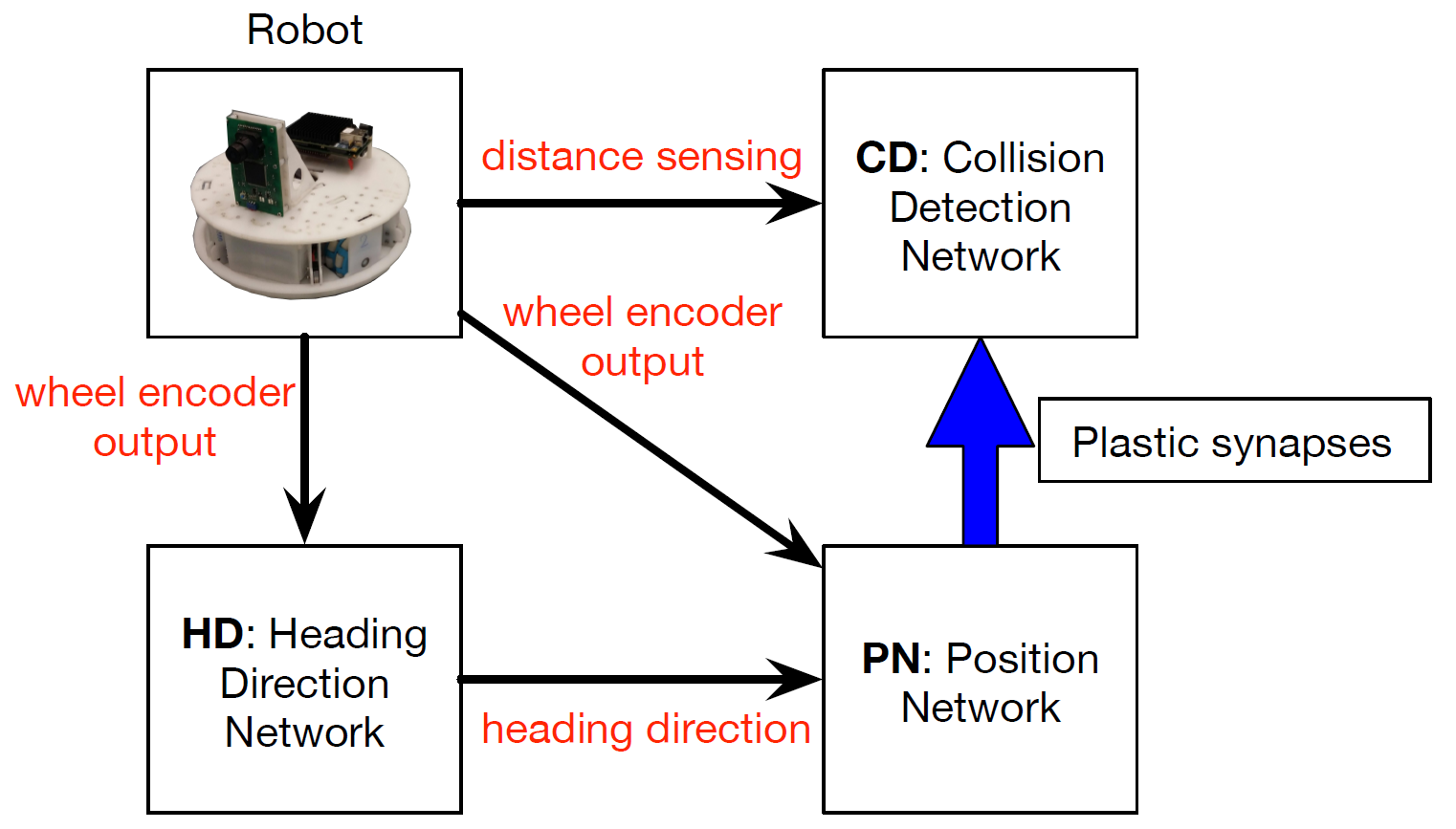
For further info, please …
About
Brain Inspired Navigation Blog
New discovery worth spreading on brain-inspired navigation in neurorobotics and neuroscience
Recent Posts
- How grid cell firing patterns rapidly adapt to novel or changing environmental features on a timescale relevant to behaviour?
- How the representations of space and time interact in the hippocampal memory system?
- How the brain integrate recent experiences into existing memories ensures that memories contain the most recently available information?
- How learning-associated astrocyte ensembles regulate memory recall?
- How bats use environmental acoustic information to perform acoustic cognitive map–based navigation?
Tags
Categories
- 3D Movement
- 3D Navigation
- 3D Path Integration
- 3D Perception
- 3D SLAM
- 3D Spatial Representation
- AI Navigation
- Bio-Inspired Robotics
- Brain-Inspired Navigation
- Cognitive Map
- Cognitive Navigation
- Episodic Memory
- Excerpt Notes
- Flying Vehicle Navigation
- Goal Representation
- Insect Navigation
- Learning to Navigate
- Neural Basis of Navigation
- Path Integration
- Path Planning
- Project
- Research Tips
- Robotic Vision
- Self-Flying Vehicles
- Semantic Memory
- Spatial Cognition
- Spatial Cognitive Computing
- Spatial Coordinate System
- Spatial Memory
- Time
- Unclassified
- Visual Cortex
- Visual Cue Cells
Links
- Laboratory of Nachum Ulanovsky
- Jeffery Lab
- BatLab
- The NeuroBat Lab
- Taube Lab
- Laurens Group
- Romani Lab
- Moser Group
- O’Keefe Group
- DoellerLab
- MilfordRobotics Group
- The Space and Memory group
- Angelaki Lab
- Spatial Cognition Lab
- McNaughton Lab
- Conradt Group
- The Fiete Lab
- The Cacucci Lab
- The Burak Lab
- Knierim Lab
- Clark Spatial Navigation & Memory Lab
- Computational Memory Lab
- The Dombeck Lab
- Zugaro Lab
- Insect Robotics Group
- The Nagel Lab
- Basu Lab
- Spatial Perception and Memory lab
- The Neuroecology lab
- The Nagel Lab
- Neural Modeling and Interface Lab
- Memory and Navigation Circuits Group
- Neural Circuits and Memory Lab
- The lab of Arseny Finkelstein
- The Epstein Lab
- Gu Lab (Spatial Navigation and Memory)
- Fisher Lab (Neural Circuits for Navigation)
- The Alexander Lab (Spatial Cognition and Memory)
- Harvey Lab (Neural Circuits for Navigation)
- Buzsáki Lab
- ……