
How to build goal-directed navigation based on path integration and decoding of grid cells in an artificial neural network?
Edvardsen, Vegard. “Goal-directed navigation based on path integration and decoding of grid cells in an artificial neural network.” Natural Computing 18, no. 1 (2019): 13-27.
The following content is extracted from Edvardsen 2019.
Edvardsen, Vegard. “Goal-directed navigation based on path integration and decoding of grid cells in an artificial neural network.” Natural Computing 18, no. 1 (2019): 13-27.
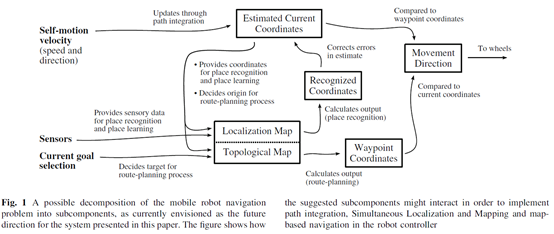
As neuroscience gradually uncovers how the brain represents and computes with high-level spatial information, the endeavor of constructing biologically-inspired robot controllers using these spatial representations has become viable. Grid cells are particularly interesting in this regard, as they are thought to provide a general coordinate system of space. Artificial neural network models of grid cells show the ability to perform path integration, but important for a robot is also the ability to calculate the direction from the current location, as indicated by the path integrator, to a remembered goal.
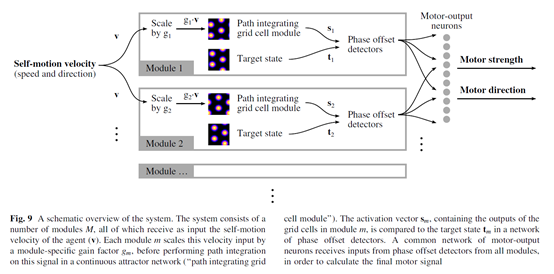
This paper presents a neural system that integrates networks of path integrating grid cells with a grid cell decoding mechanism. The decoding mechanism detects differences between multiscale grid cell representations of the present location and the goal, in order to calculate a goal-direction signal for the robot. The model successfully guides a simulated agent to its goal, showing promise for implementing the system on a real robot in the future.
The figure from Edvardsen 2019.
The figure from Edvardsen 2019.
For further info, please read the paper Edvardsen 2019.
Edvardsen, Vegard. “Goal-directed navigation based on path integration and decoding of grid cells in an artificial neural network.” Natural Computing 18, no. 1 (2019): 13-27.