
室内定位与建模相关硕士学位研究课题
室内定位与建模相关硕士学位研究课题
代尔夫特大学 三维地理信息实验室
Walter Yu 译
1、基于室内体素化模型(Voxelized Model)的3D路径查询
3D Path-finding in a voxelized model of indoor environments
体素化(Voxelisation)是一种表达3D格网的方法。基于Voxel的模型以一种离散的方式描述了室内空间。与B-Rep(Boundary Representation)方式不同,Voxel表达方式能够支持更好地分析空的空间(Empty Space)。因此,基于体素化(Voxelized)的建筑模型很适合3D室内导航。目前的路径查询方法中大多是通过构建室内环境的2D或2.5D模型(如楼层平面图或室内表面模型)来实现的。
然而,这些方法不能处理这样一些情况,如从障碍物(如桌子)上面或下面通过、在特定高度移动(如飞行)、避开悬挂物等。这项研究的目的是开发一种基于Voxel的路径查询方法,其中包括特殊的3D路径,即满足不同模式(如正常情况、应急情况)下的不同需求(如在地面上或者在空中)。需要研究的问题包括:组织Voxels的数据结构、所需要的语义信息、支持不同模式的路径查询算法。
2、FaciliDat:面向设施管理的3D室内模型及数据库模式
FaciliDat: 3D Indoor model and a database schema for facility management
大部分建筑管理人员无法获得建筑室内状态的详细信息,如建筑的数量、结构、房间、窗户大小、门、每层楼的房间区域等。每天或每年的大量维护工作通过专门的方式来进行,如打扫、翻新、粉刷、增添新家具、安防等。这样导致花费大量的劳力和财力。因此,人们对室内3D模型很感兴趣,室内3D模型中包含的拓扑和语义信息能够为建筑管理人员的工作提供很大帮助。
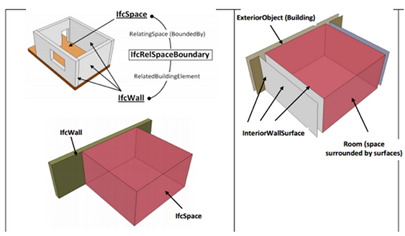
目前支持室内3D建模的两种国际标准IFC和CityGML LoD4可以利用。这两种标准面向不用的应用,有着各自的优缺点。其中IFC包含了太多详细的信息,很能集成到GIS中。而CityGML LoD4相对较简单,但主流的供应商都不支持。
第一种方案:是否存在可能建立一种3D室内模型来服务于设施管理呢?本研究将评估两种标准的适用性(可用的数据库实现如3DCityDB),并提出一种方案。扩展或改进其中一个标准,或者设计一种结合了两种标准优点的新模型。所提出的方案需要以数据库(DBMS)的数据模型进行实现,并结合预定义的用户需求进行验证。最好能够实现一个简单的Web应用来访问和浏览数据库。(需要的技能包括:UML、SQL、基本的编程能力等)。
第二种方案:在考虑有效几何和语义情况下,利用什么样的算法来实现IFC到CityGML LoD4模型的自动转换。希望能够设计一种全自动的转换方法来导出建筑模型。这可能会导致在CityGML中需要更加严格的规则来表达室内对象。(能力要求:计算几何、编程)
3、支持不同类型用户导航的灵活三维室内模型
Flexible 3D Indoor model for navigation of different types of users
虽然目前有许多室内导航应用可以使用,但这些应用只面向特殊应用(如导购、导游等),并且灵活性差。这些导航应用不能适应性地支持用户偏好或满足用户正在做的工作的特殊需求。它们没有考虑室内环境临时的或者永久性的变化,例如重新装修、重新调整空间布局、或者应急情况。将用户偏好和环境的变化反映在3D室内模型(几何和网络模型)中,这样就可实时计算导航路径。
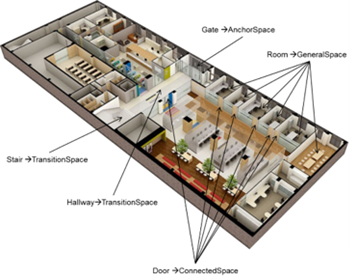
本研究将探究什么样的3D室内模型能够随着室内环境的变化为不同类型用户提供有效的导航信息,是否需要LOD或者Layers?怎样维护空间的连通性?网络模型是否可以导出来或者是与结合模型存储在一起?IndoorGML的基本概念可以作为这项研究的着手点,如对偶图和多层空间模型。需要弄清楚一般的用户偏好和反映室内环境变化的参数。最后,实现的APP要能展示出该模型和所提出的导航路径计算方法的灵活性。(技能要求:UML、SQL、编程)
4、3D室内导航:需要什么类型的路径
3D Indoor navigation: what kind of path?
目前的室内外导航系统相对较简单,提供了有限的可选功能。其中车辆导航系统提供了一些选择,如最短路径、最快路径、或避开收费站或高速。室内导航应用可以计算到达目的地序列(to visit a sequence of targets)的候选路径。文献中提到的一些选项如最少转弯路径、最多感兴趣的路径、最短通过路径、最少障碍路径等。此外,目前的导航系统大多只考虑将一个人导航到一个静态的目标点,但是这些选项是否对室内导航有效?人们想怎样在室内空间移动?需要利用或开发什么样的算法?需要什么类型的网络?


本研究需要探究室内导航的条件、相关算法和网络。可以将3D geoinformation group关于应急响应导航的相关术语作为着手点。本研究需要提出、实现、验证新的室内导航方式。(技能要求:图论、编程)
5、面向3D建模的室内扫描方法
Indoor scanning for 3D modelling
3D室内模型仍然很少、并且很难获得。3D BIM模型很难包含最新的修改,2D楼层平面图不够精确并且缺乏3D信息。测距或光学图像是一种采集3D数据相对较容易并且低成本的方式,能够支持3D建模算法。目前在市场上有一些感兴趣的技术,似乎适合室内建模,但还没有研究和比较过。


本研究主要集中在采集点云数据的ZEB1、Tango、Terrestrial Scanner和Optical Video/Images的一些技术。通过比较研究,统计对同一个点云数据进行采集、处理的参数集合时间。需要在相同条件利用相同的建筑对四种技术进行测试。选出对3D模型的部分进行快速更新的最好技术,并部署一个用于测试和评估的Test Bed。(技能要求:对扫描技术感兴趣、会点云数据处理)
6、利用点云重建3D房间(楼层、天花板和墙)
3D reconstruction of rooms (floors, ceilings and walls) from point clouds
室内3D重建是一项复杂的工作:房间包含许多对象,房间与墙和天花板相关联;许多室内空间一半是开放的,有一些中间的楼层、阳台和Strains。人工构建3D模型是很令人厌烦并且很耗时;目前还没有自动或半自动的方法。本研究主要探究、设计一种方法来识别属于室内空间或者建造体(Construct Solids)的墙、天花板和楼层。设计一种数据结构来集成管理矢量几何和相关的点云数据。解决的该问题不同方法可以作为不同的硕士研究课题:shape grammar、voxels、segmentation/classification等。(技能要求:对处理点云数据感兴趣、编程、利用现有软件的能力)
7、利用点云进行门和窗户的3D重建
3D reconstruction of doors and windows from point clouds
门和窗户对室内导航和定位很关键,但很难从点云中识别出来。因为在扫描的过程中,门和窗户可以打开或关闭,窗户可能被窗帘或遮阳板遮挡。本研究重点探究哪些室外方法可以适合室内环境。不同的方法可以作为不同的课题:如使用楼层平面图、半自动、要素检测等。(技能要求:对点云数据处理感兴趣,编程能力、会使用现有软件)
8、IndoorGML支持下的灵活室内路径计算系统架构
System architecture for flexible indoor path computation making use of IndoorGML
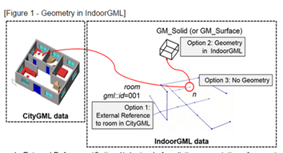
IndoorGML已经成为面向导航的室内空间信息交换标准。该标准支持三种方法来编码导航应用所需的几何和网络信息:1)通过IFC、KML或者CityGML文件提供几何,IndoorGML仅包含导航路径或者网络;2)IndoorGML中存储简单的几何和语义信息;3)没有提供几何。
对不同类型服务器-客户端应用来说,三种方式有利有弊。是基于服务器计算还是基于客户端计算?多少信息需要发送到客户端?仅导航路径或者导航路径与建筑模型一起发送到客户端?提供完整的路径或者是当用户请求时再提供路径?需要开发一套Android应用来演示不同的方法。(技能要求:Web技术、APP开发)
9、参考资料
[1] https://3d.bk.tudelft.nl/education/msctopics/