
How to get the best current activity state in continuous attractor network with population decoding?
Models of head direction and place cells often use some form of attractor network (Redish, Elga et al. 1996; Zhang 1996; Samsonovich and McNaughton 1997; Stringer, Rolls et al. 2002; Stringer, Trappenberg et al. 2002). Typically an array of cells is used, with nearby cells linked by strong excitatory connections, and distant cells linked by inhibitory connections. The stable state of such a network consists of a single cluster of active cells in a shaped peak distribution.
The orientation represented by the current activity state can be determined in several ways, such as through population vector decoding or by simply picking the most highly activated cell.
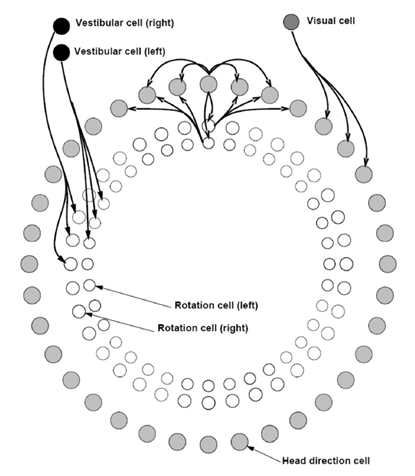
Fig. 5.1. Attractor network model of the rodent head direction system. Activity in the outer ring of head direction cells encodes orientation. The inner two rings are vestibular cells that respond to angular velocities. Links between visual cells and head direction cells are modified using a Hebbian learning rule. Head direction cells also have strong intrinsic connections that stabilise the system to a single localised cluster of active cells (Skaggs, Knierim et al. 1995). Reprinted with permission from The MIT Press.
Michael Milford. Robot Navigation from Nature: Simultaneous Localisation, Mapping, and Path Planning Based on Hippocampal Models. Springer-Verlag Berlin Heidelberg Press, pp. 41, 2008.
Redish, D., Elga, A., et al.: A coupled attractor model of the rodent head direction system. Network: Computation in Neural Systems 7, 671–685 (1996)
Zhang, K.: Representation of spatial orientation by the intrinsic dynamics of the head-direction cell ensemble: A theory. Journal of Neuroscience 16, 2112–2126 (1996)
Samsonovich, A., McNaughton, B.: Path Integration and Cognitive Mapping in a Continuous Attractor Neural Network Model. Neuroscience 17(15), 5900–5920 (1997)
Stringer, S.M., Rolls, E.T., et al.: Self-organizing continuous attractor networks and path integration: two-dimensional models of place cells. Network: Computation in Neural Systems 13, 429–446 (2002)
Stringer, S.M., Trappenberg, T.P., et al.: Self-organizing continuous attractor networks and path integration: one-dimensional models of head direction cells. Network: Computation in Neural Systems 13, 217–242 (2002)
Skaggs, W., Knierim, J., et al.: A model of the neural basis of the rat’s sense of direction. Advanced Neural Information Processing Systems 7, 173–180 (1995)
Population Vector Coding
In the model, the ongoing animal’s heading is encoded by means of a bell-shaped activity profile distributed over the LMN HD cell population. In order to reconstruct the current head direction  in bins
in bins  , a population vector scheme (Georgopoulos et al., 1986) is employed to decode the ensemble HD cell activity:
, a population vector scheme (Georgopoulos et al., 1986) is employed to decode the ensemble HD cell activity:
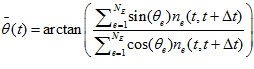
Where  is the preferred direction of unit
is the preferred direction of unit  , and the function
, and the function  is equal to 1 if the neuron
is equal to 1 if the neuron  fires in the interval
fires in the interval  , 0 otherwise.
, 0 otherwise.
Boucheny, Christian, Nicolas Brunel, and Angelo Arleo. “A continuous attractor network model without recurrent excitation: maintenance and integration in the head direction cell system.” Journal of computational neuroscience 18, no. 2 (2005): 205-227.
Georgopoulos, Apostolos P., Andrew B. Schwartz, and Ronald E. Kettner. “Neuronal population coding of movement direction.” Science (1986): 1416-1419.
Burgess, Neil, Michael Recce, and John O’Keefe. “A model of hippocampal function.” Neural networks 7, no. 6 (1994): 1065-1081.
‘Neuronal Populations’ and ‘Population Activity’
The collective properties of groups of neurons, which we call ‘neuronal populations’.
The population activity is defined as the number of spikes fired in a short instant of time, averaged across the population.
http://neuronaldynamics.epfl.ch/online/Ch12.html
Mathematics For Neuroscientists, Gabbiani and Cox
MATLAB Code for Chapter figures and Exercises Chap. 26, Population Codes
http://booksite.elsevier.com/9780123748829/pictures/code/index.html
http://www.caam.rice.edu/~caam415/
http://www.caam.rice.edu/~caam415/syl13.html