Category: Bio-Inspired Robotics
ViTa-SLAM: Biologically-Inspired Visuo-Tactile SLAM
Struckmeier, Oliver, Kshitij Tiwari, Martin J. Pearson, and Ville Kyrki. “ViTa-SLAM: Biologically-Inspired Visuo-Tactile SLAM.” arXiv preprint arXiv:1904.05667 (2019).
Abstract— In this work, Struckmeier et al. propose a novel, bio-inspired multisensory SLAM approach called ViTa-SLAM. Compared to …
Attractor Dynamics and Embodiment of Neural Computing (Neuromorphic SLAM)
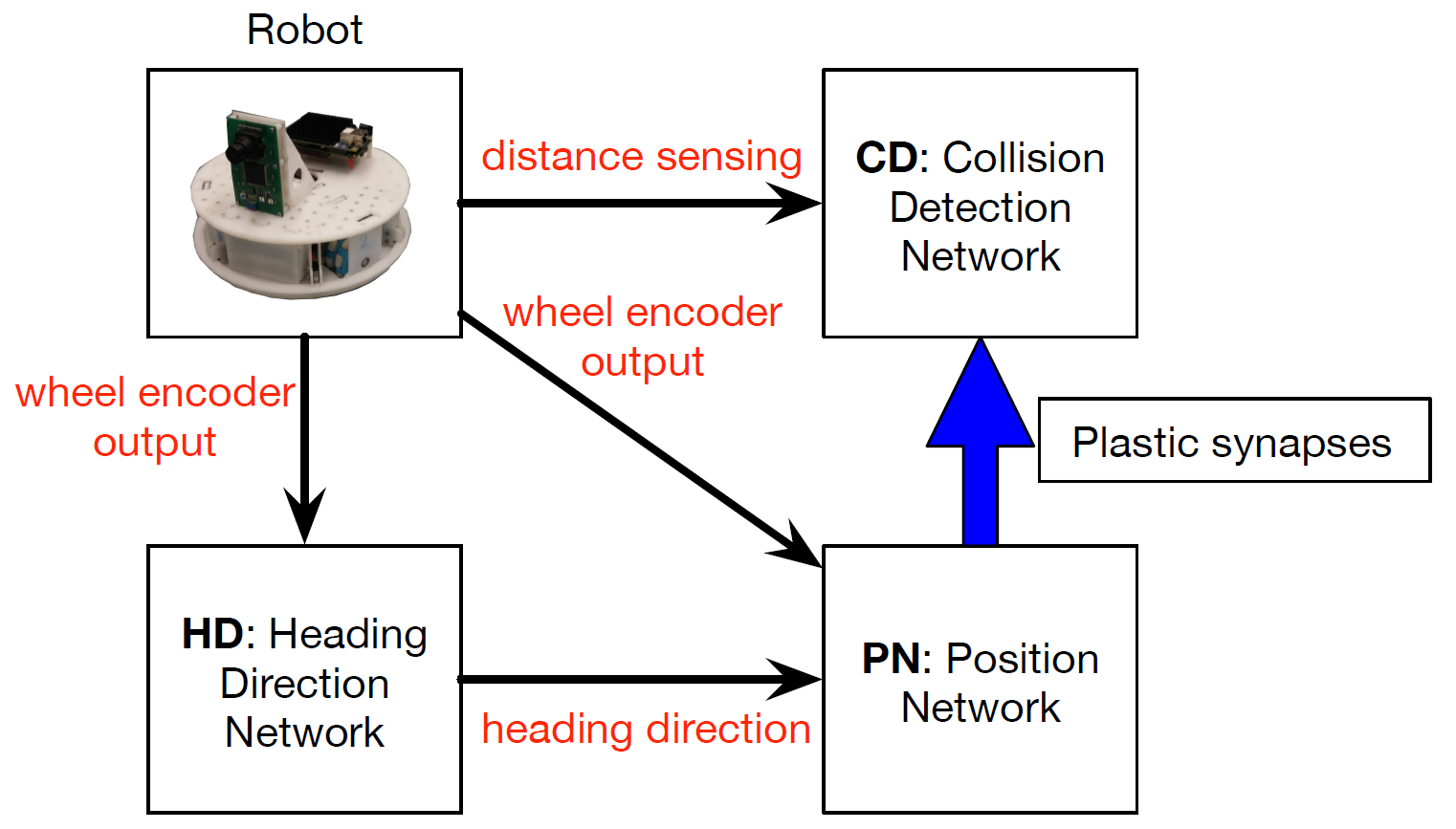
Yulia Sandamirskaya. Attractor Dynamics and Embodiment of Neural Computing. Presented at Neuro Inspired Computational Elements Workshop (NICE 2019).
Dr. Sandamirskaya talked about attractor dynamics and neuromorphic SLAM. The talks introduced head direction cells models based on neuromorphic hardware. How …
Neuro-Autonomy: Neuroscience-Inspired Perception, Navigation, and Spatial Awareness for Autonomous Robots
MURI Project Title: “Neuro-Autonomy: Neuroscience-Inspired Perception, Navigation, and Spatial Awareness for Autonomous Robots”
Project Website: http://sites.bu.edu/neuroautonomy/
https://electrical.eng.unimelb.edu.au/control-signal-processing/neuro-autonomy
The following content is extracted from the http://www.bu.edu.
A Boston University-led research team was selected to receive a $7.5 million Multidisciplinary …
Insect-Inspired Robots Don’t Need GPS For Orientation
The ‘Brains on Board’ project is a collaboration between several British universities in partnership with the Human Brain Project and seeks to ‘translate’ the brains of ants and bees into algorithms that a machine will understand. Its aim is …
Insect Navigation: From Ants to Robots and Back Again
The latest RIN Navigation News focus on Insect Navigation: From Ants to Robots and Back Again.
For further info, please visit the RIN website. …
MetaFly: flying robotic insect
For further info, please visit the site https://www.kickstarter.com/projects/274008848/metafly-a-new-flying-experience/description…
NeuroSLAM : Neural Simultaneous Localization and Mapping Workshop 13-14 Mar 2019 Paris (France)
NeuroSLAM: Neural Simultaneous Localization and Mapping Workshop
Simultaneous Localization and Mapping (or SLAM) refers to the problem of constructing a map of an unknown environment as it is actively being explored. SLAM has been treated extensively in mobile robotics, providing …
Bio-inspired wind sensation for advanced autonomous drones/UAV navigation
Reliability and accuracy of navigation in flying drones are one of the key challenges that must be solved in autonomous applications. Accurate knowledge of position, attitude, and velocity is a critical input for drones operating in cluttered and challenging environments …
A Map in the Sky for Self-Flying Vehicles
A report titled ‘Flying Taxis Take Flight, Presage New Location Intelligence‘ by Frits van der Schaaf.
…Location intelligence has long been used to present real-time information on maps—for transportation companies’ tracking of shipments; utility companies’ monitoring the status
Robots are learning how to walk like we do
Robots have walked on legs for decades. Today’s most advanced humanoid robots can tramp along flat and inclined surfaces, climb up and down stairs, and slog through rough terrain. Some can even jump.
A report about legged robots on the …
AntBot: desert ants inspired autonomous navigation in outdoor environments
J. Dupeyroux et al. 2019 presents a navigation system inspired by desert ants’ navigation behavior, which requires precise and robust sensory modalities.
They tested several ant-inspired solutions to outdoor homing navigation problems on a legged robot using two optical sensors …
How a simple robotics model of mammal navigation is useful to interpret neurobiological recordings
Place recognition is a complex process involving idiothetic and allothetic information. In mammals, evidence suggests that visual information stemming from the temporal and parietal cortical areas (‘what’ and ‘where’ information) is merged at the level of the entorhinal cortex (EC) …
DeepMind GridCells Code
The DeepMind opens the code of grid cells (Banino et al 2018) via GitHub(https://github.com/deepmind/grid-cells) in Jan. 2019. This package provides an implementation of the supervised learning experiments in Vector-based navigation using grid-like representations in artificial agents, as published …
Towards Neuromorphic SLAM and Navigation
The latest research Kreiser et al. 2018, published IROS 2018, investigated the use of ultra low-power, mixed signal analog/digital neuromorphic hardware for implementation of biologically inspired neuronal path integration and map formation for a mobile robot.
For further info, please …
How 3D grid cells encode 3D physical space in the human brain?
Novel fantastic research about 3D grid cells in the human brain by Dr. Misun Kim and Professor Eleanor A. Maguire in paper Kim et al. 2019
Misun Kim, Eleanor A. Maguire. Can we study 3D grid codes non-invasively in the …
About
Brain Inspired Navigation Blog
New discovery worth spreading on brain-inspired navigation in neurorobotics and neuroscience
Recent Posts
- Whether hippocampal theta sweeps indicate goal direction during navigation?
- How to implement sparse-to-dense coding transformation between hippocampal areas CA3 and CA1?
- How hippocampal–neocortical communication reconfigure predetermined circuit motifs to flexibly encode experiences?
- How to build efficient robot navigation inspired by honeybee learning flights?
- How tuft dendrites in frontal motor cortex enable flexible learning?
Tags
Categories
- 3D Movement
- 3D Navigation
- 3D Path Integration
- 3D Perception
- 3D SLAM
- 3D Spatial Representation
- AI Navigation
- Bio-Inspired Robotics
- Brain Inspired Localization
- Brain-Inspired Navigation
- Cognitive Map
- Cognitive Navigation
- Episodic Memory
- Excerpt Notes
- Flying Vehicle Navigation
- Goal Representation
- Insect Navigation
- Learning to Navigate
- Memory
- Neural Basis of Navigation
- Path Integration
- Path Planning
- Project
- Research Tips
- Robotic Vision
- Self-Flying Vehicles
- Semantic Memory
- Spatial Cognition
- Spatial Cognitive Computing
- Spatial Coordinate System
- Spatial Learning
- Spatial Memory
- Spatial Resoning
- Time
- Unclassified
- Visual Cortex
- Visual Cue Cells
Links
- Laboratory of Nachum Ulanovsky
- Jeffery Lab
- BatLab
- The NeuroBat Lab
- Taube Lab
- Laurens Group
- Romani Lab
- Moser Group
- O’Keefe Group
- DoellerLab
- MilfordRobotics Group
- The Space and Memory group
- Angelaki Lab
- Spatial Cognition Lab
- McNaughton Lab
- Conradt Group
- The Fiete Lab
- The Cacucci Lab
- The Burak Lab
- Knierim Lab
- Clark Spatial Navigation & Memory Lab
- Computational Memory Lab
- The Dombeck Lab
- Zugaro Lab
- Insect Robotics Group
- The Nagel Lab
- Basu Lab
- Spatial Perception and Memory lab
- The Neuroecology lab
- The Nagel Lab
- Neural Modeling and Interface Lab
- Memory and Navigation Circuits Group
- Neural Circuits and Memory Lab
- The lab of Arseny Finkelstein
- The Epstein Lab
- The Theoretical Neuroscience Lab
- Gu Lab (Spatial Navigation and Memory)
- Fisher Lab (Neural Circuits for Navigation)
- The Alexander Lab (Spatial Cognition and Memory)
- Harvey Lab (Neural Circuits for Navigation)
- Buzsáki Lab
- Brain Computation & Behavior Lab
- ……