
利用移动传感器众包室内地图
利用移动传感器众包室内地图
Crowd Sourcing Indoor Maps with Mobile Sensors
本文介绍了一种众包室内地图的算法。通过志愿者所穿戴的智能手机中的三轴加速度计、磁力计和Nike跑鞋中的压力计,在室内行走过程中,应用程序将这些众包数据发送到制图服务器。该算法再通过DR方法从这些众包数据中获取用户的步行轨迹,估计出室内地图。
一个成功的众包室内地图项目中至少包含三个问题:相对制图、全局制图和激励机制(Incentive)问题。其中相对制图最关键的问题是确定地图正确的比例和方位,本文主要解决的这个问题。而全局制图最关键的问题是把相对地图转换到某个通用的全局坐标系下,如UTM System。作者下一步将利用建筑物的出入口位置(轨迹的起点和终点)的GPS坐标和Wi-Fi热点测量值解决这个问题。此外,关于激励机制(Incentive)的问题,就是怎样激励人们搜集行走的测量数据并发送到制图服务器,其中Waze.com就是一个极好的案例。
这篇文章的主要贡献就是为解决相对制图为题提供了一种解决方案。文中提出了一种估计走廊长度和方位的方法。在计算一层楼的地图时需要正确估计三条走廊的长度和方位。长度参数的估计标准差是3%,方位参数的估计标准差是0.074弧度(约4度)。
在将来的工作中,需要对所提出的方法在多个楼层进行测试。此外,目前的研究主要限制在识别建筑物的走廊,还相对比较容易并且不需要大量的采样。当然,建筑物中还有开放空间和楼梯,这些通常比较难以识别,真正的众包地图还需要表达更多室内语义信息。
The paper describes algorithms required to enable the crowd sourcing of indoor building maps, i.e., where GPS is not available. Nevertheless to enable crowd sourcing the paper use the 3-axis accelerometers and the 3-axis magnetometers available in many smart phones and the piezometer in a Nike running shoe. Volunteers carry the sensors while walking around in buildings, and use some application on their smart phone to send the data to a mapping server. The authors present the algorithms to obtain walking trajectories from the data by dead reckoning, and to estimate indoor maps with multiple walking trajectories.
A successful project to crowd source indoor maps includes at least the following problems: the relative mapping, the global mapping, and the incentive problem. The relative mapping problem is to make a map with the correct proportions and orientation. This problem is the focus of the paper. The global mapping problem locates the relatively correct map in a common coordinate system such as the GPS Universal Transverse Mercator (UTM) system. The authors intend to address this problem next by using GPS readings at the entrances and exits of buildings (trajectory starting and ending point) and Wi-Fi hotspot readings. The incentive problem is about how to motivate the crowd to collect walking data and send them to a mapping server. Waze.com does an excellent job on this problem.
The contribution of this paper is a solution to the relative mapping problem. The authors proposed a methodology to estimate the lengths and orientations of the hallways. The authors then validate it by showing that the methods are able to estimate a floor map accurately with just a few walking samples. The authors compute the map for one floor requiring the correct estimation of three lengths and one orientation. The length parameters are estimated with a relative standard error of 3%, and the orientation parameter is estimated with a standard error of 0.074 radian (about 4 degrees), with six walking samples. The methodology should be generally applicable to other floors as long as the lengths and orientations of hallways can be estimated correctly. The authors expect the difference from floor to floor to lie in the number of samples required to obtain a correct map.
As future work, the proposed method needs to be tested on more than just one floor. Also, their study is restricted to identify hallways within buildings. They are relatively easy and not a lot of samples are needed. Looking forward, there are also open space and stairs within buildings, which are hard to identify, these are the cases when "crowd sourcing" will truly be needed.
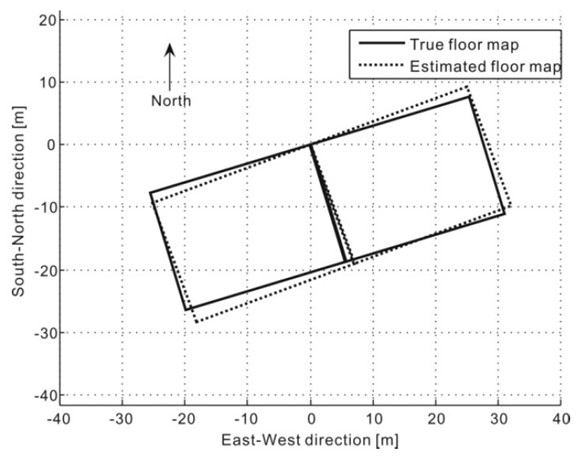
Estimated vs. true floor map of the 5th floor of Davis Hall, UC Berkeley
Xuan, Y., et al. (2012). Crowd sourcing indoor maps with mobile sensors. Mobile and Ubiquitous Systems: Computing, Networking, and Services, Springer: 125-136.