Tag: RatSLAM
How to get the best current activity state in continuous attractor network with population decoding?
Models of head direction and place cells often use some form of attractor network (Redish, Elga et al. 1996; Zhang 1996; Samsonovich and McNaughton 1997; Stringer, Rolls et al. 2002; Stringer, Trappenberg et al. 2002). Typically an array of cells …
How to implement the visual processing module for pose calibration in RatSLAM?
In this report, I summarized some key methods for visual processing module in RatSLAM or RatSLAM-based System. There are more than six approaches as following. By comparing and doing some practical experiments, I think that the intensity scanline profile and …
【Latest Papers】Cognitive Navigation by Neuro-Inspired Localization, Mapping and Episodic Memory
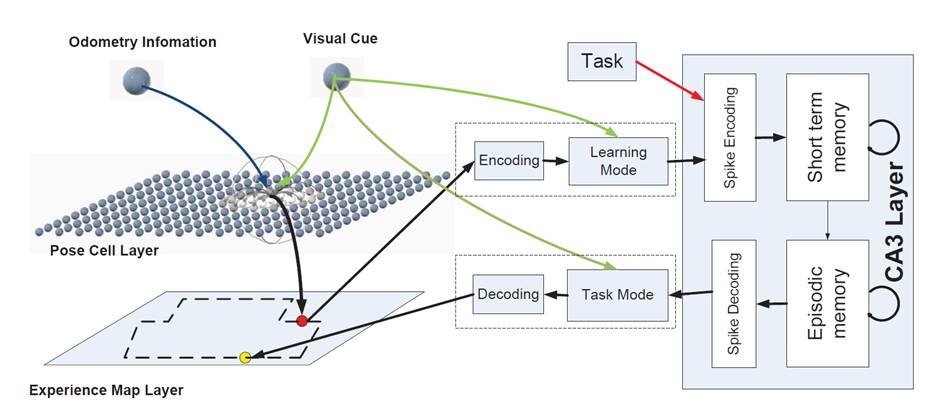 Abstract One of the important topics in the study of robotic cognition is to enable robot to perceive, plan and react to situations in a real-world environment. We present a novel angle on this subject, by integrating active navigation with …
Abstract One of the important topics in the study of robotic cognition is to enable robot to perceive, plan and react to situations in a real-world environment. We present a novel angle on this subject, by integrating active navigation with …
Some Tips When Run RatSLAM MATLAB Code
Some Tips When Run RatSLAM MATLAB Code
Fangwen Yu
Sep 21, 2017
0. RatSLAM MATLAB Code and Datasets
Open source code:
https://wiki.qut.edu.au/display/cyphy/RatSLAM+MATLAB
Datasets Links:
Here is a link to the iRat's video:
https://www.dropbox.com/s/4905nzbx4pnihr7/log_irat_red.avi?dl=0
The iRat's odom in text form:
https://www.dropbox.com/s/9ns3uknayad8y1t/log_irat_red.txt?dl=0…
About
Brain Inspired Navigation Blog
New discovery worth spreading on brain-inspired navigation in neurorobotics and neuroscience
Recent Posts
- Whether hippocampal theta sweeps indicate goal direction during navigation?
- How to implement sparse-to-dense coding transformation between hippocampal areas CA3 and CA1?
- How hippocampal–neocortical communication reconfigure predetermined circuit motifs to flexibly encode experiences?
- How to build efficient robot navigation inspired by honeybee learning flights?
- How tuft dendrites in frontal motor cortex enable flexible learning?
Tags
Categories
- 3D Movement
- 3D Navigation
- 3D Path Integration
- 3D Perception
- 3D SLAM
- 3D Spatial Representation
- AI Navigation
- Bio-Inspired Robotics
- Brain Inspired Localization
- Brain-Inspired Navigation
- Cognitive Map
- Cognitive Navigation
- Episodic Memory
- Excerpt Notes
- Flying Vehicle Navigation
- Goal Representation
- Insect Navigation
- Learning to Navigate
- Memory
- Neural Basis of Navigation
- Path Integration
- Path Planning
- Project
- Research Tips
- Robotic Vision
- Self-Flying Vehicles
- Semantic Memory
- Spatial Cognition
- Spatial Cognitive Computing
- Spatial Coordinate System
- Spatial Learning
- Spatial Memory
- Spatial Resoning
- Time
- Unclassified
- Visual Cortex
- Visual Cue Cells
Links
- Laboratory of Nachum Ulanovsky
- Jeffery Lab
- BatLab
- The NeuroBat Lab
- Taube Lab
- Laurens Group
- Romani Lab
- Moser Group
- O’Keefe Group
- DoellerLab
- MilfordRobotics Group
- The Space and Memory group
- Angelaki Lab
- Spatial Cognition Lab
- McNaughton Lab
- Conradt Group
- The Fiete Lab
- The Cacucci Lab
- The Burak Lab
- Knierim Lab
- Clark Spatial Navigation & Memory Lab
- Computational Memory Lab
- The Dombeck Lab
- Zugaro Lab
- Insect Robotics Group
- The Nagel Lab
- Basu Lab
- Spatial Perception and Memory lab
- The Neuroecology lab
- The Nagel Lab
- Neural Modeling and Interface Lab
- Memory and Navigation Circuits Group
- Neural Circuits and Memory Lab
- The lab of Arseny Finkelstein
- The Epstein Lab
- The Theoretical Neuroscience Lab
- Gu Lab (Spatial Navigation and Memory)
- Fisher Lab (Neural Circuits for Navigation)
- The Alexander Lab (Spatial Cognition and Memory)
- Harvey Lab (Neural Circuits for Navigation)
- Buzsáki Lab
- Brain Computation & Behavior Lab
- ……